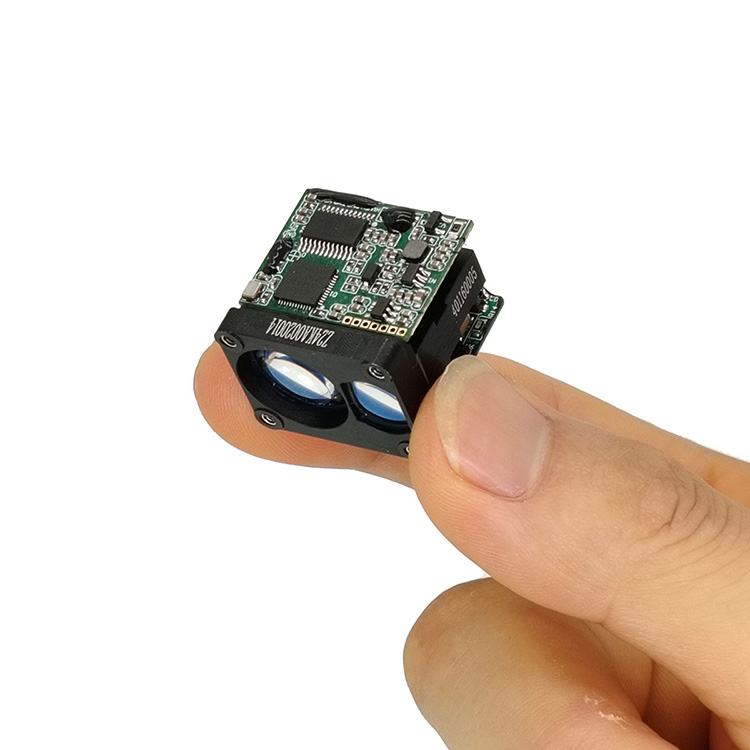
● JIO-D09C 2km マイクロレーザー距離計モジュールは、低消費電力、小型、安定した性能などの特性を備えた 905nm 半導体レーザーコンポーネントを採用しており、熱画像、ナイトビジョン、その他のハンドヘルドモバイルデバイスや小型 UAV ポッド機器の統合に適しています。
● 最大範囲 ≥2000m
●測距精度±1m
●測距周波数:単一測距/連続測距
●重量 13g±0.5g
JIO-D09C 半導体レーザー距離計は、Jioptik が慎重に開発した高度な技術と人間味のあるデザインを統合した革新的な製品です。コア光源として独自の 905nm レーザー ダイオードを使用するこのモデルは、人間の目の安全を確保するだけでなく、人間の目の安全性を確保するだけでなく、効率的なエネルギー変換と安定した出力特性により、レーザー測距分野に貢献します。Jioptikが独自に開発した高性能チップと高度なアルゴリズムを搭載したJIO-D09C 2kmマイクロレーザー距離計モジュールは、長寿命と低消費電力で優れた性能を実現し、高精度でポータブルな測距機器に対する市場の需要を完全に満たします。
UAV、照準器、屋外ハンドヘルド製品およびその他の幅広い用途 (航空、警察、鉄道、電気、水利保全、通信、環境、地質学、建設、消防署、発破、農業、林業、アウトドアスポーツなど) で使用されます。
半導体レーザー技術: 従来の飛行時間型 (TOF) 距離計よりも優れた信頼性、コンパクトさ、低消費電力により、ポータブル機器やスペースに制約のある機器への統合が可能になります。
| シリアルナンバー | プロジェクト名 | JIO-D09C |
| 1 | human eye safety | クラス1 |
| 2 | レーザー波長 | 905nm |
| 3 | Ranging range | 5~2000m |
| 4 | Ranging accuracy | ≤±1m(≤400m)、≤±(L×0.3%)m(>400m); |
| 5 | 測定周波数 | 単一測距 / 連続測距 |
| 6 | 正解率 | ≥98% |
| 7 | 誤警報率 | ≤1% |
| 8 | 電源電圧 | DC3~5V |
| 9 | 電力の浪費 | 平均消費電力: ≤1W |
| 10 | 重み | 13±0.5g |
| 11 | サイズ(長さ×幅×高さ) | 26.5×25×16mm |
| 12 | 動作温度 | -20~+60℃ |
| 13 | 保管温度 | -30~+70℃ |
| 14 | ショック | 1200g、1ms |
| 15 | Vibration | 5~50~5Hz、1オクターブ/分、2.5g |
| 16 | 信頼性 | MTBF≧1500h |
| 17 | 起動時間 | ≤200ms; |
JIO-D09C 小型レーザー距離計の主なコンポーネントは次のとおりです。
a) Control and information processing circuit assembly;
b) レーザードライバー回路アセンブリ。
c) 検出器駆動回路アセンブリ。
d) 光学機械部品。
外形寸法は26.5mm(L)×25mm(W)×16mm(H)、重量は13g以下。その外観を図1に示します。

機械的および光学的インターフェース
機械的インターフェースと光学的インターフェースの外形寸法を図 2 に示します。

図 2 機械的および光学的インターフェースの図
Electrical Interface
a) 電源電圧: 3V~5V;
b) 平均消費電力: ≤ 1W;
c) 上位コンピュータ側は 06SUR-32S コネクタを介して SM06B-SURS-TF コネクタを使用して距離測定器側の架橋テストを行い、距離測定器側の電源および通信ポートのピン定義は表 2 に示します。 , 図 3 に示すように 1 足の位置。
表 2 測距装置の電源端と通信ポートのピン定義
| ピン | ラベリング | 電気的特性の定義 | 信号の方向 |
| 1 | ヴィン- | 負の入力電力 | 電源 |
| 2 | VIN+ | 正の入力電源 | |
| 3 | グランド | シリアルポートのグランド | コミュニケーショングラウンド |
| 4 | UART_TX | TTL_3.3V | シリアルトランスミッター |
| 5 | UART_RX | シリアルレシーバー | |
| 6 | UART_0N | 一時停止または低レベルの電源がオフ、高レベルの電源がオン |

図 3 コネクタのピン 1 の位置
通信インターフェース
a) ボーレート: 115200;
b) バイト構成: 1 スタート ビット、8 データ ビット、1 ストップ ビット、パリティ ビットなし。
通信速度と通信フォーマット
| フォーマット規格 |
Baud rate (bps): 115200; バイトデータフォーマット:1スタートビット、8データビット、1ストップビット、パリティビットなし |
送信パケットの基本フォーマット
| 説明 | バイト数 | 値の範囲 | 備考 |
| フレームヘッダー | 2 | 0x55 0xAA | 固定値 |
| コマンドコード | 1 | 0~255 | 現在の制御コマンドの制御対象を示します |
| データ1 | 1 | 0~255 | |
| データ2 | 1 | 0~255 | |
| データ3 | 1 | 0~255 | |
| データ4 | 1 | 0~255 | |
| チェックサム | 1 | 0~255 | チェックサムは、コマンド コードの下位 8 ビット、データ 1 ~ 4、およびデータの全バイトです。 |
Return packet basic format
| 説明 | バイト数 | 値の範囲 | 備考 |
| フレームヘッダー | 2 | 0x55 0xAA | 固定値 |
| コマンドコード | 1 | 0~255 | 現在の制御コマンドの制御対象を示します |
| データ1 | 1 | 0~255 | |
| データ2 | 1 | 0~255 | |
| データ3 | 1 | 0~255 | |
| データ4 | 1 | 0~255 | |
| チェックサム | 1 | 0~255 | チェックサムは、コマンド コードの下位 8 ビット、データ 1 ~ 4、およびデータの全バイトです。 |
特定のプロトコル
単一測距
測距モジュールに送信される
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x55 | 0xAA | 0x88 | 0xFF | 0xFF | 0xFF | 0xFF | チェックデジット |
測距モジュールの戻り値
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x55 | 0xAA | 0x88 | 状態 | 0xFF | データ_H | データ_L | チェックデジット |
| ステータス: 0 - 単一の測定失敗 (DATA_H=0xFF、DATA_L=0xFF)。 1 - 単一測定成功 (DATA_H = 測定結果の上位バイト、DATA_L = 測定結果の下位バイト) |
||||||||
Continuous ranging
測距モジュールに送信
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x55 | 0xAA | 0x89 | 0xFF | 0xFF | 0xFF | 0xFF | チェックデジット |
測距モジュールの戻り値
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x55 | 0xAA | 0x89 | 状態 | 0xFF | データ_H | データ_L | チェックデジット |
| ステータス: 0 - 複数の測定失敗 (DATA_H=0xFF、DATA_L=0xFF)。 1 - 複数の測定成功 (DATA_H = 測定結果の上位バイト、DATA_L = 測定結果の下位バイト) |
||||||||
測距を停止する
測距モジュールに送信します。
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x55 | 0xAA | 0x8E | 0xFF | 0xFF | 0xFF | 0xFF | チェックデジット |
測距モジュールの戻り値
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x55 | 0xAA | 0x8E | 状態 | 0xFF | 0xFF | 0xFF | チェックデジット |
| ステータス: 0 - 複数の測定の停止に失敗しました。 1 - 複数の測定の停止に成功しました。 |
||||||||
注: データは 16 進数で返され、すべてのデータ結果は実数データに 10 を乗算した出力になります。
例: dist=2000.3m、出力データは 20003 で、16 進数に変換すると 4E23、つまり Data1=0x4E、Data2=0x23 となります。
製品の詳細については、Jioptik にお問い合わせください。